 巨乳 gif
巨乳 gif
2021年3月,雷军推出了小米首款折叠手机MIX FOLD,也负责通知了要跨界造车,这一年,华为也带来了Mate 40系列,仍是配置两年多的华为车BU,推出了华为乾崑智驾的第一代版块,华为ADS 1.0。三年后,华为智驾版块仍是迭代了2次,小米汽车也迎来了第一次城区NOA升级,从实测体验看,智驾举座的逻辑趋于东说念主类驾驶员,后果似乎相等接近华为ADS 3.0,如果从小米SU7的上市时分运转算,快要7个月,就险些赶上了华为在当年一年的迭代水平,那么问题来了,这一次,小米智驾新版块的实力究竟怎样?有莫得可能在来岁追平华为?
复杂路口不再保守,但下一代版块细节处搭理更好?
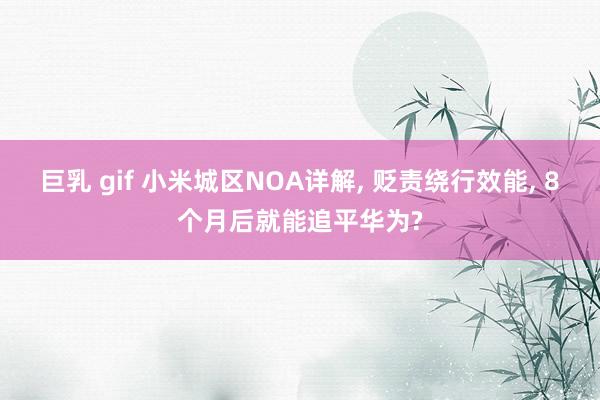
在聊小米汽车城区NOA 1.4.0的后果之前,咱们有必要先肤浅复盘一番小米汽车的端到端大模子。现阶段国内险些系数波及高阶自动驾驶期间的车企,王人从分段式汇集切换到了端到端一阵势大模子,具体的期间逻辑这里不再赘述,肤浅说,就是不必再给贬抑端写代码规章,把感知端和规控端交融成一个大模子,方向就是减少数据传输的时分,在面临发生过的事情时有训戒处理,面临没发生的事去学着处理,这是一个主动学习的历程,最终让系统完结“看到就现实”的后果,小米的智驾期间亦然如斯。

从底层逻辑看,其实和梦想汽车的One-Model结构相等一样,王人是端到端+视觉言语模子(VLM),亦然用到了2枚算力508TOPS的英伟达 Orin-X芯片。不同的是,小米汽车在BEV汇集上用到了变焦期间,也就是不错在感知层面作念到动态改动,当在比较锻真金不怕火精度要求的窄路或者泊车场时,像素网格大小会调治到0.05米,而在相对开阔的场景下,这个尺寸会扩大到0.2米,这亦然能够完结双向十车说念无保护左转的基础条款,梦想汽车固然没用上变焦BEV期间,然则基于快慢两套系统除外,实质上比小米汽车多了一个云霄天下模子,当系统遭受无法贬责的问题时,会将集合纪录后的数据上传,在云霄将问题场景进行二次搭建,让大数据分析问题根源之后再针对性进行查验,学习后再交给端到端处理,总之三套模子之间是相互辅助的研究,这两套智驾系统比起来,在不同场景下王人有各自的上风。
 巨乳 gif
巨乳 gif
在上一代的智驾版块中,有不少车主给到的反馈是,复杂路口的处理终点严慎,东说念主车混行之下经受频次较高,其实比拟后期对硬件层面的调治,这类属于软件层面的问题通过OTA作念优化更容易贬责,在智驾框架想路笃定之后,接下来更多的使命就是赓续再去优化细节。是以在这一次的新版块中,挑升强调仍是优化了功能升左迁逻辑,对车辆和行东说念主的速率检测也进行了优化,方向就是幸免再出现遭受东说念主车流量大的交错路口,系统算不准相宜的起步时机只可主动左迁。

在新版块中,多了U型路的掉头智力,更据交通讯号灯指示能够自主通行,在无前车的路口也能通过,扶助对静态占说念的临泊车、锥桶、三角架等辞谢物绕行,从现在大王人实测的体验来看,新版块在复杂路口的通行轨迹和细节如实愈加趋于拟东说念主化,比如,在变说念逻辑中,现在市面上大多智驾系统深广的作念法是,提前开启转向灯,在相宜的机会再插入打算说念路,而此次小米汽车的新版块,是确保和后车具备安全距离,并笃定后车的梗概领路轨迹之后,险些在现实转向的同期开启转向灯。再比如,在无保护左转弯逻辑中,新版块不会按照前车的领路轨迹跟车行驶,而是会向左多打半圈,绕到前车侧后方的“安全区”,精巧的行使前车的位置,躲开了和对向车辆、行东说念主或者非纯真车的混轮博弈。

这两个细节的进步,不错说基本贬责掉了绝大大王人变说念转弯的贫穷,不外这一代版块也有需要进步的地点,比如,通行效能的优化进程还不够,由于系统在复杂路口作念了较多的安全冗余,举座响应会显得稍慢一些,在丁字路口仍是出现相宜的起步机会时,系统识别到了后方有正在迁徙的辞谢物,是以还在有计划是否络续看成时的几秒钟,错过了本不错径直通行的机会,尽管在复杂路口系统左迁的次数变少了,但通行的效能依然不够高。
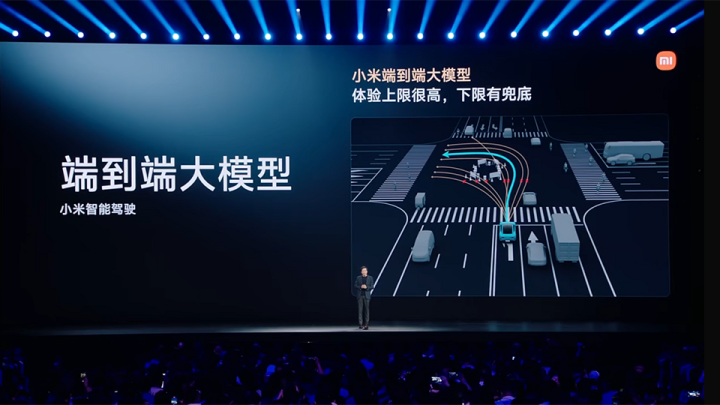
另外,当行驶至说念路中央有静态车辆占说念时,系统并不是一说念王人会接纳绕行,即即是说念路划线非实线,系统也会教唆需要经受,然则在变说念、转弯时,大王人情况又不错完结畅通的绕行,这个各别较着是有筹办还不够“熟习”,一部分原因也可能是小米SU7的录用量还在加多,数据累积量还不够多,雷军在最近一次的城区NOA体验中也提到了,在北京50公里把握的城市说念路,全程出现了4次经受,原因分歧是遭受了事故无法绕行、修路施工、列队收支收费站和东说念主行桥下遭受强加塞,是以不出不测,不才一个版块中,这些细节可能王人会被优化。
不必高线束激光雷达,来岁也能追平华为ADS 3.0?
从小米汽车新版块的城区NOA后果来看,其实很猛进程上,不错说仍是相等接近梦想汽车的6.4版块了,也相对接近那时还没把BEV融到GOD汇集的华为ADS 2.0。那,来岁有机会追平ADS 3.0吗?

谜底是大略率不错完结。当先,咱们从感知硬件来看,现阶段要完结华为ADS 3.0满血功能,是需要1颗激光雷达(192线)、3颗毫米波雷达(一颗4D)、11个录像头和12颗超声波雷达,在不同感知硬件的数目上,实质上小米汽车亦然如斯,只不外,激光雷达用的如故禾赛提供的128线(同款梦想汽车),在探伤距离上比华为自研那枚少了50米,另外小米莫得搭载4D毫米波雷达,华为用的来自硕贝德,探伤距离在280米,而且擅长捕捉不规章异性辞谢物,通过回波将集合到的数据开导立体坐标,再合营及时扫图的192线激光雷达,不错说这套组合把GOD大网的上风一说念能挖掘出来,这亦然为什么,华为在本年10月25日,仅仅发布了对细节优化的ADS Pro V3.1版块,而不是发布4.0的原因之一。

表面上讲,96线、128线和196线,线束越多,探伤的精度和精度当然越高,而且现在车规级激光雷达产业的价钱仍是降到了千元级别,小米汽车似乎莫得情理不更换高线束的激光雷达,为什么还会用禾赛的128线呢?这是因为,高线束激光雷达本就会占用一部分算力资源,而华为ADS 3.0的芯片算力仍是作念到了1000TOPS,小米汽车用的2颗英伟达 Orin-X芯片,类似后算力固然唯有508TOPS,但分给128线激光雷达的资源空间鼓胀用,而这其中最要害的就是,小米汽车只须不淹没BEV期间,就不需要高线束激光雷达。

BEV汇集的特质,就是将通盘场景给辞谢物码上坐标,然后再对每个辞谢物单独去作念领路轨迹分析、预判,前边仍是提到,小米汽车还用上了变焦BEV期间,就是为了把不同场景的精度作念好,而且BEV汇集对算力的要求远不如高线束激光雷达,这在一定进程上不错说是给VLM让出了一大部分算力资源,而针对说念路细节的感知任务,在华为ADS 3.0体系里是由4D毫米波雷达负责的,是以,这么一来,华为的GOD+PDP和小米的端到端+VLM巨乳 gif,就酿成了两类天壤之隔的期间道路,底层逻辑看似疏浚,然则感知层面需要的储备却是不同的,至于二者的大模子智力,现在王人仍是具备了从周更升级到日更级别,是以接下来要作念的,就是比拼数据累积量了,毕竟实测有用数据越丰富,学习查验后的大模子才会更“灵巧”。临了也就能给出一波展望了,小米SU7上市7个月就险些作念到了华为用一年升级的ADS 2.0水平,跟着后续录用量和数据的进步,计算很快下一代版块就会发出,追平ADS 3.0,大略率来岁会完结,要是参考小米初次推送的节点(本年6月)来看,不排斥来岁6月也会发布新版块,这距离追平华为的时分,还剩下8个月。